![[靈蜂智能官網(wǎng)]-專業(yè)紅外熱像儀廠家](http://linfun.com.cn/wp-content/uploads/2022/06/2022060807191642.png)
![[靈蜂智能官網(wǎng)]-專業(yè)紅外熱像儀廠家](http://linfun.com.cn/wp-content/uploads/2021/10/202110130602107.png)
應(yīng)用方案—機(jī)器人在甘蔗農(nóng)作物里使用紅外熱像儀實(shí)現(xiàn)快速導(dǎo)航
農(nóng)業(yè)機(jī)器人技術(shù)面臨的主要挑戰(zhàn)之一是應(yīng)對不同環(huán)境類型的自主導(dǎo)航。盡管已經(jīng)為小型露天場所和結(jié)構(gòu)化的室內(nèi)設(shè)施(例如溫室和苗圃)合理地提出了該問題的幾種解決方案,但是對于大型非結(jié)構(gòu)化且密集的草類作物(例如甘蔗、小麥、玉米、大麥)環(huán)境而言卻難以解決。因?yàn)榕c普通的農(nóng)田不同,甘蔗農(nóng)場通常是廣闊的,可容納許多密集且難以接近的排田隧道。此外,甘蔗作物處在惡劣的地區(qū),這阻礙了雇用人員和重型機(jī)械進(jìn)行制圖,監(jiān)測和取樣的后勤工作。
一般用于農(nóng)作物的機(jī)器人為智能生物能源農(nóng)業(yè)坦克,旨在甘蔗田中執(zhí)行許多農(nóng)業(yè)任務(wù)。但是該機(jī)器人的導(dǎo)航問題尤為突出,例如(i)需要穿越狹窄的農(nóng)作物走廊,地形不平坦,葉子被困,GPS覆蓋率差并且難以解釋RGB相機(jī)或激光器的數(shù)據(jù);(ii)盡管存在非完整系統(tǒng)的運(yùn)動(dòng)控制和路徑規(guī)劃方面的相關(guān)研究,但由于該行駛曲線需要滑移現(xiàn)象,因此滑移效應(yīng)分析尚不成熟;(iii)基于其低成本的設(shè)計(jì)理念,導(dǎo)致了有限的硬件和處理能力。
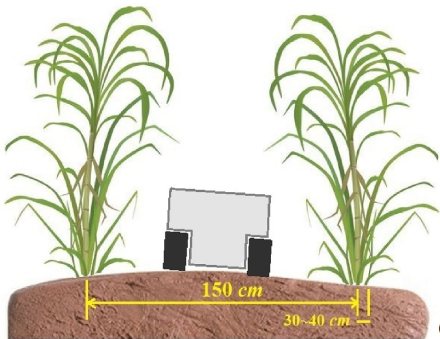
圖為智能生物能源農(nóng)業(yè)坦克
在這項(xiàng)工作中,挪威生命科學(xué)大學(xué)科學(xué)技術(shù)學(xué)院的科學(xué)家為在甘蔗農(nóng)作物中運(yùn)行的移動(dòng)機(jī)器人開發(fā)了基于紅外熱成像的導(dǎo)航方法。關(guān)鍵思想是結(jié)合運(yùn)動(dòng)學(xué)建模方法、機(jī)器人定位技術(shù)、紅外熱成像技術(shù)、軌跡規(guī)劃算法和運(yùn)動(dòng)控制策略等不同的學(xué)科領(lǐng)域,創(chuàng)建一種自主導(dǎo)航解決方案,以確保成功執(zhí)行農(nóng)業(yè)領(lǐng)域的監(jiān)視任務(wù)。紅外熱圖像提供易于檢測的功能,它可以檢測從物體自然發(fā)出的熱輻射,因此可以分配主動(dòng)源,將熱能傳輸?shù)侥繕?biāo),從而減輕了基于激光的制圖所帶來的生命危險(xiǎn)。與匹配的RGB圖像相比,能夠收集更多的現(xiàn)場數(shù)據(jù),以幫助我們更好地了解不同的日光/天氣條件(例如,夜晚,雨天,霧天,季節(jié))下的環(huán)境熱剖面,并繪制土壤和作物之間熱對比度差的組合圖。通過從現(xiàn)場收集的熱圖像和數(shù)值模擬推斷出生成的路徑進(jìn)行驗(yàn)證和確認(rèn)。具有更高的可靠性。在甘蔗作物中進(jìn)行的初步實(shí)驗(yàn)測試也說明了所建議的導(dǎo)航方法的效率和可行性,該方法由不同的實(shí)施階段組成。

圖為機(jī)器人拍攝的紅外圖像和彩色圖像
參考資料:
Marco F. S. Xaud1, Antonio C. Leite and Pal J. From. Thermal Image Based Navigation System for Skid-Steering Mobile Robots in Sugarcane Crops [C]. 2019 IEEE International Conference on Robotics and Automation (ICRA). 2019.